L'écolage hélicoptère entre deux émetteurs.
Le moment de la journée où sont prévus les cours de pilotage doit être
bien choisi !
Pour de l'écolage simple, style stationnaire avec de légères translations,
une bonne luminosité n'est pas obligatoire. Par contre, faire de la double
commande avec de bons déplacements et certaines figures d'accro nécessite
une bonne visualisation du modèle en l'air !
Quand l'on pilote soi-même la machine, on ne la voit pas seulement dans
le ciel mais on la ressent dans les doigts ! Récupérer le modèle de l'élève
éloigné qui se trouve dans une situation délicate dans une ombre foncée
dans le ciel n'est pas évident.
Chez Futaba, il existe plusieurs choix possibles :
1. L'émetteur maître peut refiler toutes les commandes à 100% de la course des servos à l'élève !
2. L'émetteur maître peut refiler toutes les commandes avec un pourcentage de la course des servos bien définis qui est programmée dans la radio du maître ! ( exemple 30% )
3. L'émetteur maître peut refiler une à une commande à 100% de la course des servos à l'élève !
4. L'émetteur maître peut refiler une à une commande avec un pourcentage de course des servos bien définis qui est programmée dans la radio du maître ! ( exemple 30% )
Ces quatre points ci-dessus peuvent être mixés !
Cela veut dire que l'émetteur maître peut intervenir à tout moment par-dessus
l'émetteur de l'élève. Il faut quand même préciser qu'au cas ou le manche
de l'émetteur élève reste en position maxi de débattement, le moniteur ne
peut pas contrer à 100% par-dessus ! Il faut tout de même que l'élève lâche
les manches !
Lors de l'écolage, autant le mode mixage que le mode fixe peuvent être actionnés
par un commutateur avec retour automatique ou un avec 2 positions. ON /
OFF
Au début j'avais commencé entre ma FC 18 et la FC 16

Ça n'a jamais bien fonctionné. Je ne me souviens plus très bien mais il ne m'était pas possible de programmer correctement la FC 18.
La double commande vous évite de la casse sur votre modèle et de même, vous fait progresser plus vite. La peur d'un crash vous retient dans l'exécution de certaines figures.
Le fait d'avoir un moniteur à ses côtés sécurise et de plus, l'élève évolue
plus rapidement.
Le prix est par heure de vol réel. Il y a aussi une différence de prix si
c'est avec votre hélico ou le mien.
Faut savoir qu'avec votre machine, les réactions en vol de cette dernière
vous sont plus familières qu'avec la mienne. Par contre, un certain temps
de programmation de ma radio sera comptabilisé.
Je fais volontiers une offre ! L'endroit choisi pour l'écolage doit être
défini avant.
Si le choix s'est fait sur votre hélico et que c'est de l'écolage accro,
il me faut faire un vol complet seul afin de me familiariser avec l'hélico.
Question sécurité, bien sûr !
Ma préférence : Chez nous, au terrain d'Avenches, avec ma machine. Mais je peux me déplacer sans autre. Mon prix n'est pas à comparer à celui des professionnels !
La sortie de l'antenne est superflue et il n'est pas nécessaire de la monter.
Un accu émetteur élève est également de trop ainsi que le module HF !
Par contre, les réglages de la radio élève doivent plus ou moins correspondre et cette dernière doit être capable de piloter le modèle à elle seule.
PS : Si aucun accu est disponible dans la radio de l'élève, les réglages se feront avec le câble branché sur l'émetteur maître en marche.

Il en existe d'innombrables sur le marché. Savoir lequel est le mieux,
le moins cher, le plus réaliste ou avec le plus de détail n'est pas si évident
que ça.
L'informatique évolue tellement vite que vous proposer un logiciel n'est
pas mon travail, d'autant plus que si vous relisez mes lignes dans quelques
mois, il y aura déjà mieux !
Par contre il existe un site WEB où l'on peut se renseigner en tout temps.
Personnellement j'en ai eu un qui tournait sur Windows 3.1 !
Mon impression sur ce produit d'époque est, à part qu'il m'ait coûté bien
cher ne m'a rien amené sur le pilotage de nos bijoux.
Le graphisme était de mauvaise qualité, le pilotage pas réaliste, trop de
possibilités de réglages qui alourdissaient passablement le bon emploi du
système.
Bref, je ne sais plus comment il s'appelle et il a fini au fond d'un tiroir.
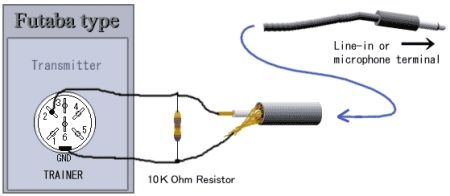
J'en possède un nouveau qui est gratuit où il suffit juste de fabriquer le câble de transmission entre le PC ( prise micro ) et la prise écolage de la radio ( Futaba ou JR )
L'émetteur maître doit posséder une prise écolage et un commutateur avec retour automatique.
La transmission entre les deux émetteurs se fait par le biais d'un câble
!
Il existe aujourd'hui des systèmes de transmission sans câble !
Ces fonctions peuvent êtres choisies par quatre commutateurs externes + un principal

1. Commutateur 2 positions pour la fonction tangage N° 1 ( A1 = rouge )
2. Commutateur 2 positions pour la fonction aillerons N° 2 ( A2 = bleu )
3. Commutateur 2 positions pour la fonction de gaz et pitch N° 3 et N° 6
( A3 = violet )
4. Commutateur 2 positions pour la fonction d'anti-couple N° 4 ( A4 = jaune
)
Le commutateur encerclé en bleu clair est le principal qui actionne la fonction TRAINER
PS : les numéros suivant sont => N°1 => sortie récepteur 1
Le rajout d'une fonction supplémentaire est alors très vite fait !
Autre moyen :
Ces fonctions peuvent êtres choisies par un seul commutateur externe ! ( 2 positions avec retour automatique )

Par contre, le rajout d'une fonction supplémentaire affilié à l'élève se
fera par le biais de la programmation.
Dans la page de programmation de l'émetteur maître, il faut mettre le même
commutateur externe sur les diverses fonctions affiliées.
Exemple d'écolage sur hélico avec une personne qui n'a pas grande idée sur le pilotage de ces modèles.
Je lui laisse en mode mixage que deux fonctions => tangage et aillerons
Ces dernières lui sont autorisées en permanence mais seulement avec 50 % de débattement des servos.

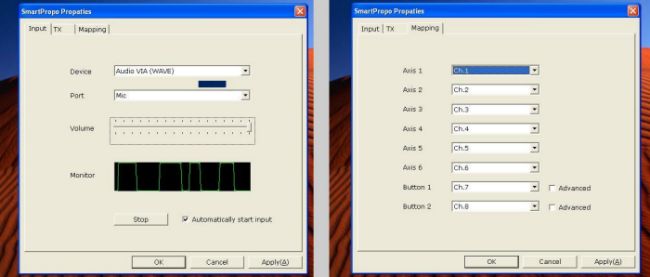
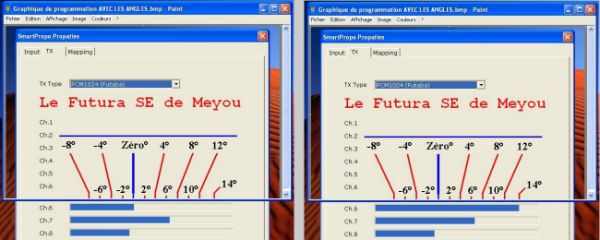
Pour commencer avec l'image de la page Input ( à gauche ) elle nous sert à visualiser si la transmission fonctionne ou pas. L'oscilloscope doit bouger ( vague verte sur fond noir ) s'il n'y a qu'un trait droit, la radio n'est pas en marche ou le câble est mal branché ou pour finir, la radio transmet en mode PPM ( fonctionne qu'en PCM )
L'image de la page Mapping ( à droite ) nous permet une configuration différente
des manches, par exemple le manche du Pitch à droite !
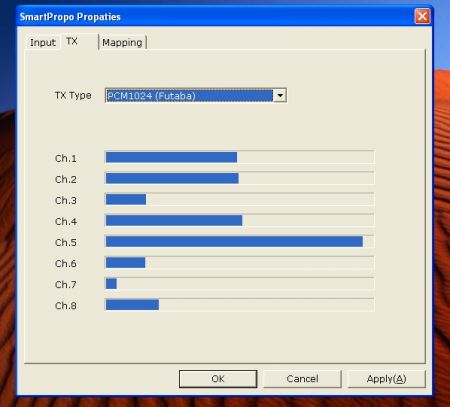
Je me fiche un peu de ces deux pages, moi ce qui m'intéresse surtout c'est
la page TX
Ce réglage m'autorise en tout temps de contrer l'élève !
Le commutateur choisi sera dans ce cas un 2 positions ( cercle rouge ).
Et oui, il me faut avoir des doigts libres.
Ces 50 % qui ont droit sont déductibles du débattement qui est programmé
dans la radio maître.
Exemple :
Dans ma radio, j'ai une course servo de 60 % au tangage et 90 % aux aillerons, ma machine est programmée de cette façon et vole très bien avec ces réglages.
Lors de l'écolage, l'élève pilote avec la moitié ( 50% ) de mes débattements, ce qui donne 30 % au tangage et 45 % aux aillerons.
Cette course des servos est pour l'élève amplement suffisante !
Le débutant nous voit tirer sur les manches lors de translation rapide avec virages serrés pensant faire de même une fois qu'il est lui-même aux manches, il vous tournera assez vite la machine sur le toit, alors plutôt commencer avec moins de course que trop !
Les deux fonctions du haut sont assez maîtrisées par un débutant.
L'élève nous fait un petit déplacement du manche des ailerons sur la droite
suivi d'une correction de la queue par le maître, fera déjà une petite marche
avant du modèle, passant le manche des ailerons légèrement à gauche suivi
d'une nouvelle correction de la queue avec un peu de pitch du maître, ramènera
l'hélico vers soi !
La fonction de l'anti-couple est la dernière à affilier à l'élève. S'il a le malheur de tourner le museau de l'appareil vers soi, il est garanti qu'il se plante avec les ailerons ou le tangage et va probablement pousser le manche à fond. ( cette manuvre se passe très vite et elle est dure à rattraper )
PS : La communication entre les deux pilotes est très importante, chaque déplacement ou figure devraient être annoncés à l'avance !
La temporisation est super pratique, les fonctions dont on n'a pas forcément un servo croché dessus peut avec ce dernier parfaitement être simulé et compris. Style : Gyros, Régulateur de régime etc...
Et le tout évidement dans les cinq différents états de vol !
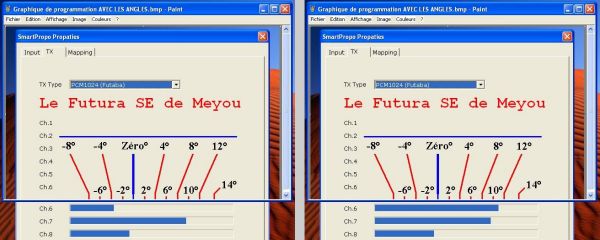
Quelques graphiques comme exemples d'emplois visuels des 8 fonctions :
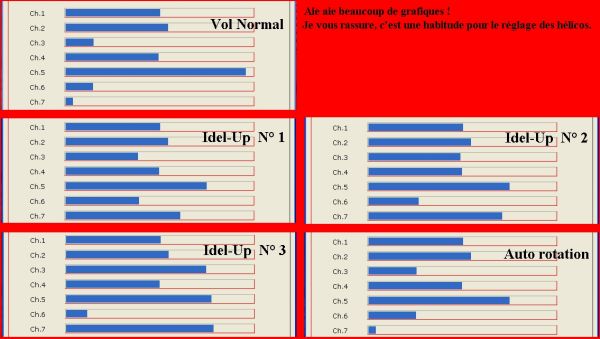
Sur ce dernier graphique, il y a d'innombrables infos importantes. ( Sachez que le manche de la radio est toujours en bas )
- La différence entre les servos N°1 et N°2 peut provenir de deux choses
!
Ou bien les trims externes ne sont pas centrés ( ce n'est pas le cas de ma radio lors de la prise de l'image )
Dans le cas présent, il y a un ajustage du neutre des servos dans le menu SUB TRIM programme N° 51.
- La fonction N° 3 ( servo des gaz ) change à chaque état.
Etat Normal => il est au ralenti
Idel-Up N° 1 => déjà un peu de gaz
Idel-Up N° 2 => déjà bien plus de gaz
Idel-Up N° 3 => pratiquement plein de gaz
Auto rotation => un peu plus que le ralenti
- Passons à la voie N°4 dans le cas du réglage du Futura, le réglage est pratiquement identique sur les 5 états ! Même que j'aurais pu envisager une diminution de la course servo anti-couple dans le programme Idel-Up N° 1, puisque j'emploie cet état pour un déplacement en bout de terrain. Un rotor anti-couple vivace ne me sert à rien ! J'ai tout de même gardé le réglage pareil pour la raison suivante, c'est qu'avec un système de rotor principal tournant plus bas ( 1200 tours/min ) la queue devient automatiquement moins agressive.
- La fonction N° 5 qui est généralement réservée pour la sensibilité du
Gyro reste pratiquement inchangée.
Il est vrai que le réglage sur le Futura n'est pas Top en ce moment. La logique devrait nous montrer une diminution de la sensibilité sur les divers états de vols. Plus le système tourne avec une fréquence élevée, plus il faut diminuer la correction du Gyro => hé oui, le rotor anti-couple tournant plus vite, la correction qu'exerce le gyro sera exagérée et donc interprétée par un balancement gauche / droite de la queue.
- Pour la fonction du Pitch ( N°6 ), je préfère vous la démontrer avec des graphiques se situant plus bas !
- La sortie de récepteur N° 7 commande le régulateur de régime.
Cette fonction pilote le servo des gaz en parallèle avec la fonction N° 3
L'image nous démontre bien que dans l'état de vol normal ainsi que l'auto rotation l'effet est nul. Il est bien clair que c'est une logique !
- La voie N° 8 est une doublure de la 7 ! Le seul détail, c'est que je
peux enclencher le régulateur ou le laisser inactif sans pour autant débrancher
les câbles. Cette fonction est pilotée par commutateur de voies 3 positions.
Il me permet d'avoir en plus, deux différentes fréquences de rotations
sur l'état de vol Normal,
Idel-Up N° 1 2 et 3 !
Exemple Nomal => Régul. coupé ou 1400 ou 1700 trs/minute
Exemple Idel-Up N° 1 => Régul. coupé ou 1200 ou 1300 trs/minute
Exemple Idel-Up N° 2 => Régul. coupé ou 1500 ou 1650 trs/minute
Exemple Idel-Up N° 3 => Régul. coupé ou 1800 ou 1900 trs/minute
Donc, j'ai le choix sur 8 régimes différents, Super non ? ? ! !
Attention tout de même avec le contrôle du régulateur dans l'état de vol
Normal.
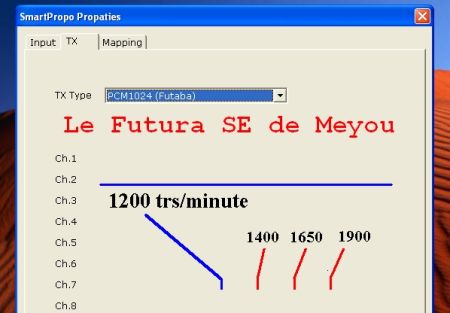
Quelques graphiques comme exemples d'emplois visuels du Pitch :
Il faut tout d'abord préciser que j'ai rajouté sur le PC une copie d'image
en format Paint que j'ai retravaillé par après.
Cette image avec le nom du Model est cadrée par le biais des bords et ajustée
en grandeur.
J'ai fait la graduation à partir des valeur réelles que j'ai mesurées sur
le modèle nature.
Pour savoir où se situe le -8° j'ai pris l'Idel-Up N°3 manche bas et pour
le +14° avec le programme de l'auto rotation manche haut. La distance entre
les trais intermédiaires est calculée et mesurée directement sur l'écran
du PC.
PS : Seul désavantage, Il faut une image par modèle d'hélico.
Le type de transmission doit être en mode PCM sinon ça ne fonctionne pas.
Le simulateur en question s'appelle FMS => Flying Model Simulator
Ci-dessous avec le Cobra !

Le simulateur étant gratuit, il est tout à fait OK ! Pour acquérir un bon
apprentissage avec un tel logiciel n'est pas si facile. Le plus gros problème
est la taille que prend la machine sur de grandes distances. Il faudrait
avoir un écran 19 pouces, et c'est un minimum !
N'ayant pas trop la sensibilité sur le modèle et surtout une puissance fictive,
la machine s'éloigne très vite et devient vite petite et dur dur pour se
rendre encore compte de l'état de vol.
Quoi qu'il en soit, tous les grands pilotes se sont exercés à avoir de bonnes
réactions dans des phases de vol critiques. Vous pensez bien que ça limite
les frais.
Pour ma part, je ne suis pas trop chaud pour l'employer...
Mais il contient tout de même un truc super intéressant pour moi ou pour
tout autre personne se penchant un peu plus dans la programmation avancée
des états de vol.
Etat de vol => Idel-Up N°1
La voie N° 6 étant contrôlée avec ces diagrammes
PS : Je ne sais pas si vous vous souvenez du réglage de l'incidence de
pale dans L'Idel-Up 1
Je tâche toujours d'avoir le pas mini à 0° ceci afin de pouvoir régler la
fréquence de rotation en ayant un couple minimum.
Etat de vol => Idel-Up N° 2
La voie N° 6 étant contrôlée avec ces diagrammes
Je ne vais pas vous mettre les 3 autres états de vols soit le N° 1, le
N° 3, l'auto rotation et l'état normal Le résultat sur le graphique étant
pareil.
Nous apercevons également la voie N° 7 et 8. Laissons complètement de côté
la N° 8 pour cause de bricole / tests de ma part . La fonction est bidon
et pas employée !
Un réglage identique peut se faire sans problème avec la fréquence de rotation VOIE N° 7 !
La barre bleu N° 7 nous démontrerait une différence de la fréquence de rotations entre l'Idel-Up 1 et 2 ! L'Idel-Up N°3 serait encore plus haut alors que la barre bleue pour l'auto rotation serait tout à gauche. ( pas d'exemple graphique )
Ci-dessus l'image sur Paint unique sans l'avoir placé sur le Driver.
La graduation est faite au bol et c'est juste un essai d'image.
Par contre s'il fonctionne une fois, je vous dis pas le gain de temps, d'essence
et de sécurité.
Un certain risque général reste pour faire tourner la machine au sol sans
les pales principales et le capteur " optosensor " de la Futaba FC 28 par
dessus les palettes.
Sur le PC, il restera juste à ajuster avec les pourcentages de la radio la barrette bleue sur la graduation. Le premier calibrage mini / maxi est obligatoire avec la machine nature en rotation.
Je dois de nouveau le préciser mais la radio FUTABA FC 28 nous autorise des réglages vraiment TOP et d'innombrables possibilités ! Elle reste toutefois une radio dont la facilité de programmation est déjà dépassée ! En d'autres termes, il existe de nos jours des radios où l'entrée des données est plus simple, rapide et compréhensible.
Voilà tout sur le simulateur et son Driver.
Je suis désolé d'avoir à nouveau quitté le sujet de l'écolage sur hélico
mais je devais en parler à la suite des simulateurs qui, eux, doivent être
dans ces quelques lignes de l'écolage.